Microplate Robot
Are you designing a new lab instrument or device that needs automation? Let our Microplate Robot Handle the Motion!
Lab Automation
Are you backlogged with test requests, and your customer is begging faster results? Let our microplate handling robot do the work!
Diagnostic Devices
Are you developing a new desktop device? We have a the most compact microplate motion system on the market. Our XYZ motion platform is Plug-N-Play ready.
Life Science Research
Are you working in Life Science and still hand pipetting? Why not automate this with our microplate handler system! Move 96-well plate precisely under your liquid dispensing nozzle.
Clinical Chemistry
Need to automate your workflow? Try our full motion microplate robot for your liquid handling projects. Easy to connect to your laptop computer.
Complete Microplate Handler
Medical Diagnostic Systems and other Life Science Instruments require automation for sample preparation (i.e., moving, mixing, and dispensing of materials) as well as analysis of the sample. Many companies prefer to work on the science and outsource the mechanics of building the machine. That’s where we enter the picture. Our business is the mechanics.
This is the backbone to many of our newest XYZ MicroPlate Handling systems.
TPA Motion Microplate Robot is an all-inclusive robot designed to transport microplates and other payloads around inside a laboratory instrument or other machine. It includes all the major motion control elements (e.g., motors, bearings, feedback, limit sensors, and wiring harness) needed to achieve this task in a single, pre-engineered, pre-tested robot. These elements are packaged together in a way that is ideal for the instrument application and avoids many of the pitfalls of designing such a device from scratch.
We work with scientists to develop the most compact desktop systems in the world.
Our Microplate Robots
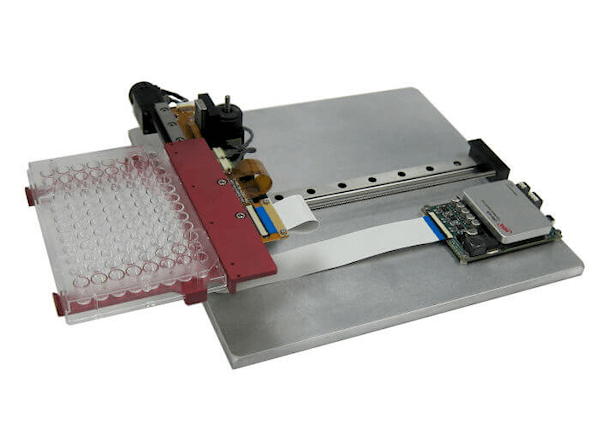
Microplate XYZ Robot
Our microplate robots are fully featured XYZ motion systems for moving micro plates, glass slides or other payloads around inside your instrument. Each robot is highly integrated and optimized for size, enabling the most compact instrument possible. We have standard designs or we can work to your design specifications to meet your performance requirements.
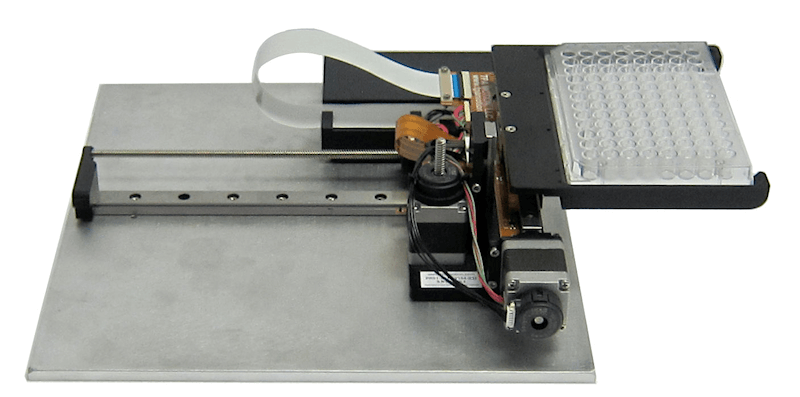
Plate Robot Full Chassis
After developing this XYZ motion system, we worked closely with this customer through several generations of the machine resulting in a very compact stable chassis upon which their enclosure (i.e., housing shell with name and logo) was attached.
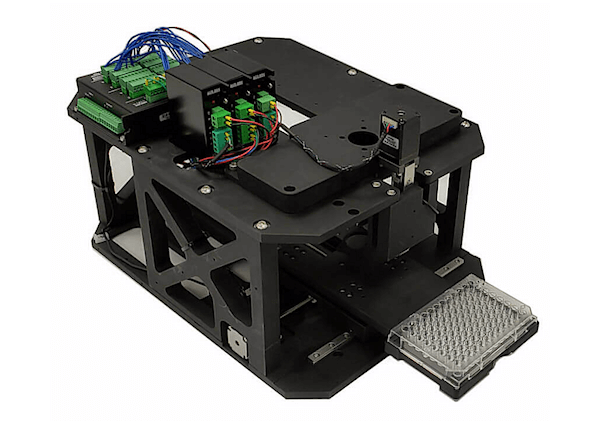
Plate Robot for large work area
While most of our robots use similar base structure, this robot is incorporates a fourth motion axis. In this particular case it was necessary to secure the unit and not allow anyone to inadvertently open it the during operation. Thus, a fourth motion axis was added to open and close the unit.
After making so many variations, we learned that most applications have similar requirements.
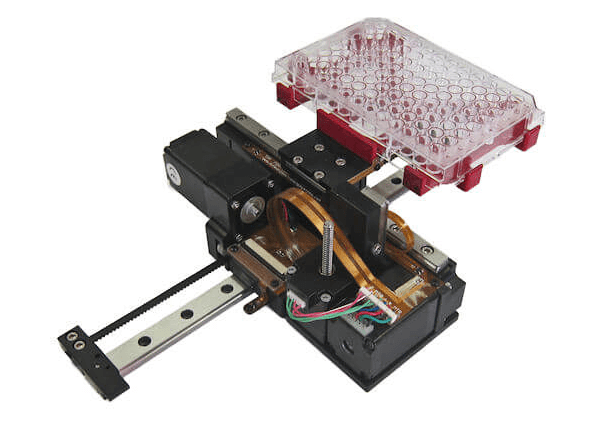
High volume for desktop diagnostics
Late 2018 Timeframe
Microplate Robot XYZ belt drive system produced in high volume for desktop diagnostic product.
Ready for customer branding
Early 2019 Timeframe
Microplate Robot XYZ system with robust chassis making this a very stable platform. Ready for molded shell (i.e.,skin) with customer branding.
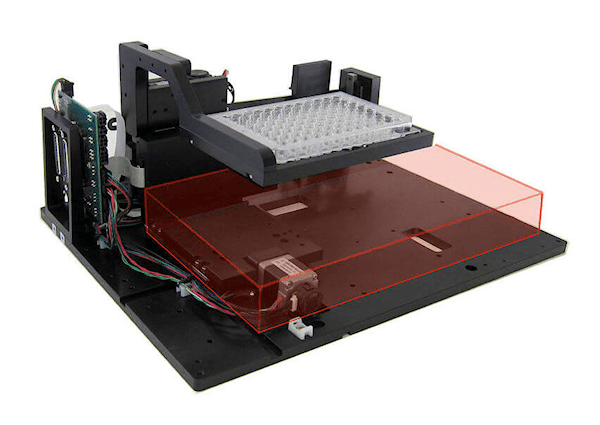
Additional 4th axis
Late 2021 Timeframe
Microplate Robot XYZ system with an additional 4th axis. Incorporates a special or custom microplate holder for submerging 96-well plate into a liquid bath.
Better accuracy and less maintenence
Late 2021 Timeframe
Microplate Robot XYZ system with leadscrew drives on all axis. Better accuracy and less maintenance than belt drive systems.